
Описание
AZSMZ Mini Ver 2,1 + AZSMZ 12864 lcd
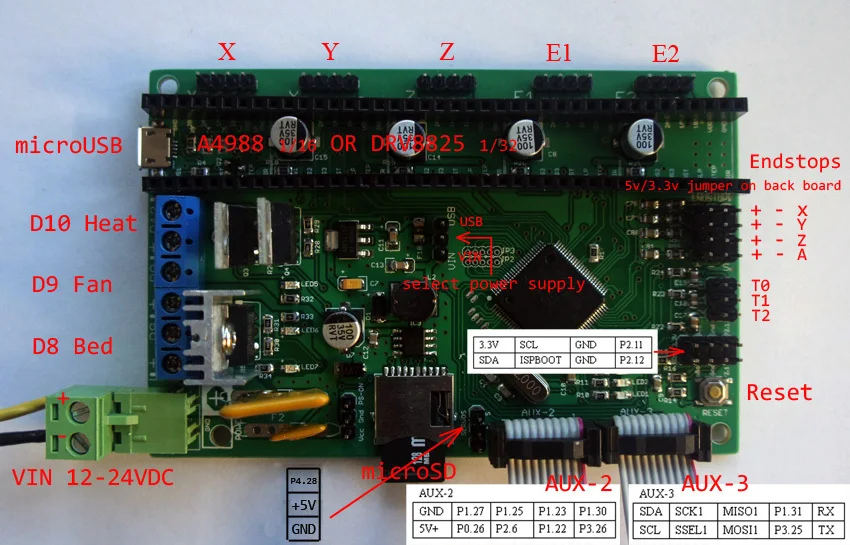
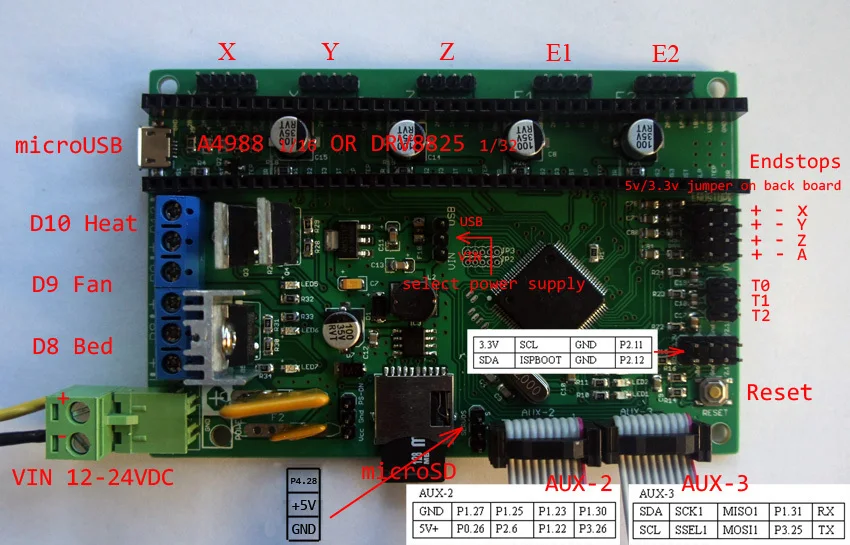
1.Azsmz мини(32 бит ARM для движения контроллер для 3D принтеры, станков с ЧПУ и лазерные резчики.)
2.Azsmz 12864 ЖК-дисплей. УTFРазъем илиSDРазъем.Пожалуйста, оставьте сообщение, по умолчанию отправьтеSD Гнездо. Спасибо.
Примечание: не содержит каких-либоSD карта
|

 ОбразецConfig.txt:
ОбразецConfig.txt:
# Примечание линии не должны превышать 132 символов
# Роботизированный Модуль конфигурации: общая обработка движения g-кодов и нарезки в ходы
Default_feed_rate 4000 # степени случаев неудачи (мм/мин) для G1/G2/G3 движется
Default_seek_rate 4000 # скорость по умолчанию (мм/мин) для движения G0
Mm_per_arc_segment 0,5 # дуги нарезаны на сегменты (линии), это длина для
# Это сегментами. Меньшее значение означает большее разрешение,
# Более высокие значения означает более быстрое вычисление
# Mm_per_line_segment 0,5 # линии можно разрезать на сегменты (не пригодны для cartesian
# Координаты роботов).
Delta_segents_per_second 100 # для deltas только то же, что и в Marlin/Delta, установите на 0 для отключения
# И использовать mm_per_line_segment
# Конфигурация решения: декартовский Роботизированный. Преобразует положение мм в шаговые позиции
Arm_раствор linear_delta # выбирает решение delta arm
Alpha_steps_per_mm 100 # шаги на мм для alpha шагового
Beta_steps_per_mm 100 # шаги на мм для beta шагового
Gamma_steps_per_mm 100 # шаги на мм для шагового гамма
Arm_length 196,8 # это длина руки от шарнира до шарнира
Arm_radius 101,9 # это горизонтальное расстояние от шарнира до шарнира
# Когда эффектор центрируется
# Конфигурация модуля планировщика: вид вперед и конфигурация ускорения
Планировщик _ queue_size 32 # не меняйте это, если вы не знаете, что именно вы делаете
Ускорение 3000 # ускорение в мм/секунду.
Acceleration _ticks_per_second 1000 # количество раз в секунду скорость обновляется
Junction_deviation 0,05 # аналогично старому "max_jerk", в миллиметрах,
# Более низкие значения означает быть более внимательным, более высокие значения означает быть
# Быстрее и иметь больше дерьма
# Minimum_planner_speed 0,0 # устанавливает минимальную скорость планировщика в мм/сек
# Шаговый модуль конфигурации
Microseconds_per_step_pulse 1 # длительность шаговых импульсов до Шаговые драйверы, в микросекундах
Minimum_steps_per_minute 1200 # никогда не шагать медленнее, чем это
Base_stepping_frequency 100000 # Базовая частота для шагового шага, выше дает плавное движение
# Ограничения скорости Cartesian axis
X_axis_max_speed 30000 # мм/мин
Y_axis_max_speed 30000 # мм/мин
Z_axis_max_speed 30000 # мм/мин
# Шаговый модуль штырьков (порты и номера штырьков, appending "!" к номеру будет инвертировать pin)
Alpha_step_pin 2,0 # Pin для шагового сигнала alpha
Alpha_dir_pin 0,5 # Pin для Альфа шагового направления
Alpha_en_pin 0,4 # булавки для Альфа включить Pin-код
Alpha_max_rate 30000,0 # мм/мин
Beta_step_pin 2,1 # Pin для beta шагового сигнала
Beta_dir_pin 0,11 # Pin для beta шагового направления
Beta_en_pin 0,10 # Pin для beta enable
Beta_max_rate 30000,0 # мм/мин
Gamma_step_pin 2,2 # Pin для шагового сигнала гамма
Gamma_dir_pin 0,20 # Pin для шагового направления гамма
Gamma_en_pin 0,19 # Pin для гамма включения
Gamma_max_rate 30000,0 # мм/мин
# Конфигурация последовательной связи (скорость передачи по умолчанию до 9600 если не определена)
Uart0.baud _ rate 115200 # скорость передачи данных для последовательного порта оборудования по умолчанию
# Конфигурация последовательной связи (скорость передачи данных по умолчанию до 9600 если не определена)
Серийный. baud_rate 115200 # скорость передачи данных по умолчанию аппаратный последовательный порт
Second_usb_serial_enable false # это включает второй последовательный порт usb (чтобы иметь оба pronterface
# И подключен терминал)
Leds_disable false # отключите использование светодиодов после настройки
# Msd_disable true # отключите MSD (USB SDCARD), когда Установите в true
# Disable_msd Размер
Dfu_enableЛожные
# Экструдер Модуль конфигурации
Экструдер. hotend. Включите true #, активировать ли модуль экструдера. Вся конфигурация не учитывается, если false
Экструдер. hotend. steps_per_mm 506 # шаги на мм для экструдера шагового
Экструдер. hotend. default_feed_rate 600 # скорость по умолчанию (мм/мин) для перемещений, где движется только экструдер
Экструдер. hotend. Ускорение 500 # ускорение для шагового двигателя, по 0,6, произвольное соотношение
Экструдер. hotend. max_speed 200 # мм/с
Экструдер. hotend. step_pin 2,3 # Pin для шагового сигнала экструдера
Экструдер. hotend. dir_pin 0,22 # Pin для экструдера dir сигнала
Экструдер. hotend. en_pin 0,21 # Pin для экструдера включить сигнал
# Экструдер офсетная печать
# Экструдер. hotend. x_offset 0 # x смещение от начала в мм
# Экструдер. hotend. y_offset 0 # y смещение от начала в мм
# Экструдер. hotend. z_offset 0 # z смещение от начала в мм
# Прошивки убрать настройки при использовании G10/G11, это по умолчанию, если не определен, должны быть определены для каждой экструдер в том случае, если в тех случаях, когда они не используют по умолчанию
# Экструдер. hotend. rect_length 3 # длина вычитания в мм
# Экструдер. hotend. rect_feedrate 45 # retract feedrate в мм/сек
# Экструдер. hotend. rect_recover_length 0 # Дополнительная длина для восстановления
# Экструдер. hotend. rect_recover_feedrate 8 # восстанавливает feedrate в мм/сек (должен быть меньше, чем вычесть feedrate)
# Экструдер. hotend. rect_zlift_length 0 # zlift on retract in mm, 0 отключает
# Экструдер. hotend. rect_zlift_feedrate 6000 # zlift feedrate в мм/мин (Примечание мм/мин не мм/сек)
# Delta_curток 1,5 # первый шаговый двигатель тока
# Второй пример конфигурации модуля экструдера
Экструдер. hotend2.enable false # активирует ли модуль экструдера. Вся конфигурация не учитывается, если false
Экструдер. hotend2.steps _ per_mm 140 # шаги на мм для экструдера шагового
Экструдер. hotend2.default _ feed_rate 600 # степени случаев неудачи (мм/мин) для двигается в тех случаях, когда только в экструдер движется
Экструдер. hotend2.acceleration 500 # ускорение для шагового двигателя, по 0,6, произвольное соотношение
Экструдер. hotend2.max _ скорость 50 # мм/с
Экструдер. hotend2.step _ pin 2,8 # булавки для экструдер шаг сигнала
Экструдер. hotend2.dir _ pin 2,13 # Pin для экструдера dir сигнала
Экструдер. hotend2.en _ pin 4,29 # Pin для экструдера включить сигнал
# Экструдер. hotend2.x _ смещение 0 # x смещение от начала в мм
# Экструдер. hotend2.y _ смещение 25,0 # y смещение от начала в мм
# Экструдер. hotend2.z _ смещение 0 # z смещение от начала в мм
# Epsilon_curток 1,5 # второй шаговый двигатель ток
# Лазерный модуль конфигурации
Laser_module_enable false # активирует ли лазерный модуль. Все настройки
# Не учитывается, если обманно.
# Laser_module_pin 2,5 # этот контакт будет PWMed для управления лазером. Только в том случае, P2.0-P2.5
# Может использоваться, так как лазер требует аппаратного PWM
# Laser_module_max_power 0,8 # это максимальный рабочий цикл, который будет применен к лазеру
# Laser_module_tickle_power 0,0 # этот рабочий цикл будет использован для перемещения, чтобы сохранить лазер
# Активный без фактического сжигания
# Laser_module_pwm_period 20 # это устанавливает частоту pwm как период в микросекундах
# Hotend конфигурация контроля температуры
Температурный _ контроллер. hotend.enable true # активирует ли этот модуль ("hotend").
# Вся конфигурация не учитывается, если false.
Температура _ контроллер. hotend.thermistor_pin 0,23 # Pin для термистора для чтения
Температура _ контроллер. hotend.heater_pin 2,4 # Pin, который контролирует нагреватель
Temperature_control.hotend.thermistor EPCOS100K # см
# Температура _ контроллер. hotend.beta 4066 # или установите бета-значение
Temperature_control.hotend.set_m_code 104 #
Temperature_control.hotend.set_and_wait_m_code 109 #
Temperature_control.hotend.designator T #
# Температура _ контроллер. hotend.p_factor 13,7 # постоянно устанавливают значения PID после автоматического pid
# Temperature_control.hotend.i_factor 0,097 #
# Temperature_control.hotend.d_factor 24 #
# Температура _ контроллер. hotend.max_pwm 64 # max pwm, 64 является хорошим значением, если Вождение 12 В резистор с 24 В.
# Hotend2 конфигурация контроля температуры
Temperature_control.hotend2.enable накладные # независимо от того, чтобы активировать этот ("hotend") модуль вообще.
# Вся конфигурация не учитывается, если false.
Temperature_control.hotend2.thermistor_pin 0,24 # булавки для термистор следующим образом:
Temperature_control.hotend2.heater_pin 2,7 # Pin-код, который регулирует работу нагреватель
Temperature_control.hotend2.thermistor EPCOS100K #
# Temperature_control.hotend2.beta 4066 # или установить бета-соотношение цена/качество
# Temperature_control.hotend2.set_m_code 884 #
# Temperature_control.hotend2.set_and_wait_m_code 889 #
# Temperature_control.hotend2.designator T1 #
# Temperature_control.hotend2.p_factor 13,7 # постоянно комплект значения PID после того, как авто pid
# Temperature_control.hotend2.i_factor 0,097 #
# Temperature_control.hotend2.d_factor 24 #
# Temperature_control.hotend2.max_pwm 64 # max pwm, 64-это хорошее соотношение цены и качества, если за рулем 12 v резистор с напряжением 24 В.
Temperature_control.bed.enable накладные #
Temperature_control.bed.thermistor_pin 0,25 #
Temperature_control.bed.heater_pin 2,5 #
Temperature_control.bed.thermistor EPCOS100K # см
# Температура _ контроль. Бета 4066 # или установка бета-значения
# Temperature_control.bed.set_m_code 140 #
# Temperature_control.bed.set_and_wait_m_code 190 #
# Temperature_control.bed.designator B #
# Температура _ управление. постельное белье. bang_bang false # Установите значение true, чтобы использовать контроль взрыва, а не PID
# Температура _ контроль. беде. гистерезис 2,0 # установите температуру в градусах C для использования в качестве гистерезиса
# При использовании bang
# Модуль переключателя для управления вентилятором
Переключатель. Вентилятор. Включите true #
Переключатель. вентилятор. input_on_command M106 #
Переключатель. вентилятор. input_off_command M107 #
Переключатель. вентилятор. output_pin 2,7 # Если вентилятор для D9 комплект 2,7 или fan1 0,26
Переключатель. fan. output_type pwm # вывод pwm с параметром S в input_on_comand
# Switch. fan. max_pwm 255 # набор max pwm для pin по умолчанию 255
# Switch. misc. enable true #
# Переключатель. доп. input_on_command M42 #
# Switch. misc. input_off_command M43 #
# Switch. misc. output_pin 2,4 #
# Switch. misc. output_type digital # просто ВКЛ или ВЫКЛ.
# Автоматическое переключение переключателя При указанной температуре. Различные из них могут быть определены для контроля различных температур и переключения различных сосисок
# Полезно включить вентилятор или водяной насос, чтобы охладить hotend
# Температуресведьма. hotend. enable true #
# Температуресведьма. hotend. designator T # Первый символ управления температурой для использования в качестве датчика температуры для контроля
# Температурная ведьма. hotend. switch misc # выберите, какой переключатель использовать, соответствует имени определенного переключателя
# Температурная ведьма. hotend. threshold_temp 60,0 # температура для включения (при подъеме) или выключения выключателя
# Температуресведьма. hotend. hetend _poll 15 # poll heatup с интервалами 15 сек
# Температурная ведьма. hotend. cooldown_poll 60 # poll cooldown с интервалами 60 сек
# Модуль переключателя для управления шпинделем
# Переключатель. шпиндель. Включить false #
# Концевики
Endstops_enable true # модуль endstop включен по умолчанию и может быть отключен здесь
Delta_homing true # вытесняет все три оси в одно и то же время независимо от
# Что указано в G28
Alpha_min_endstop nc #
Alpha_max_endstop 1,24 ^ # add! Для инвертирования вытягивания, Если переключатель не заземлен
Alpha_homing_direction home_to_max # Home up
Alpha_max 0 #
Beta_min_endstop nc #
Beta_max_endstop 1,26 ^ #
Beta_homing_direction home_to_max #
Beta_max 0 #
Gamma_min_endstop nc #
Gamma_max_endstop 1,28 ^ #
Gamma_homing_direction home_to_max #
Gamma_max 237 #
Alpha_fast_homing_rate_mm_s 200 # homing feedrates в мм/секунду
Beta_fast_homing_rate_mm_s 200 #
Gamma_fast_homing_rate_mm_s 200 #
Alpha_slow_homing_rate_mm_s 20 #
Beta_slow_homing_rate_mm_s 20 #
Gamma_slow_homing_rate_mm_s 20
Alpha_homing_rect_mm 5 # расстояние отката/отскока после гоминга в мм
Beta_homing_retract_mm 5 # разъемная застежка-молния
Gamma_homing_retract_mm 5 # разъемная застежка-молния
Alpha_trim-5 # обшивка программного обеспечения для alpha stepper endstop (в мм)
Beta_trim-5 # обшивка программного обеспечения для Бета шагового торца (в мм)
Gamma_trim-5 # обшивка программного обеспечения для гамма шагового торца (в мм)
# Endstop_debounce_count 100 # uncomment, если вы получаете шум на ваших конечных остановках
# Дополнительный Z зонд
Zprobe. Включите true # set в true, чтобы включить zprobe
Zprobe. probe_pin 1,29 ^ # pin Зонд прикреплен, если NC удалить!
Zprobe. slw_feedrate 5 # мм/сек скорость подачи зонда
# Zprobe. debounce_count 100 # набор, если шумный
Zprobe. fast_feedrate 100 # move feedrate мм/сек
Zprobe. probe_height 5 # сколько выше кровати, чтобы начать зонд
# Gamma_min_endstop nc # нормально 1,28. Изменить на nc для предотвращения коллизии,
# Связанных с zprobe выравнивания стратегии по применению
# Leveling-strategy.delta-calibration.enable true # базовая калибровка delta
# Leveling-strategy.delta-calibration.radius 100 # радиус зонда
# Кнопка паузы
# Pause_button_enable true # кнопка Pause enable
# Pause_button_pin 2,12 # кнопка паузы. По умолчанию является P2.12
# Kill_button_enable false # set true для включения кнопки kill
# Kill_button_pin 2,11 # кнопка kill pin. По умолчанию такой же, как кнопка паузы 2,12 (2,11-другой хороший выбор)
# Панель
Панель. Включите true # set в true, чтобы включить код панели
Панель. с ЖК-дисплеемViki2# St7565_glcd
Панель. spi_channel 0 # spi канал для использования; GLCD EXP1 Pins 3,5 (MOSI, SCLK)
Панель. spi_cs_pin 1,22 # spi чип выберите; GLCD EXP1 Pin 4
Панель. a0_pin2,6
Панель. encoder_a_pin 4,28! ^ # кодировщик pin; GLCD EXP2 Pin 3
Панель. encoder_b_pin 1,27! ^ # кодировщик pin; GLCD EXP2 Pin 5
Панель. click_button_pin 3,26! ^
Панель. buzz_pin 1,30
# Panel. pause_button_pin 1,23! ^ # kill/pause; GLCD EXP2 Pin 8
Панель. заднего хода1
Панель. external_sd true # Установите значение true, если на панели есть внешняя sdcard
Панель. external_sd.spi_channel 0 # set spi channel sdcard включен
Панель. external_sd.spi_cs_pin 0,16 # набор spi чип выберите для sdcard
Панель. external_sdd.sdcd_pin 3,25! ^ # sd обнаруживает сигнал (Установите в nc, если нет sdcard detect)
# Panel. button_pause_pin 2,10! ^ # kill/pause; GLCD EXP2 Pin 8
# Panel. button_pause_pin 1,23! ^ # kill/pause; GLCD EXP2 Pin 8
# Panel. back_button_pin 1,23! ^ # Задняя кнопка; GLCD EXP2 Pin 8 или
Панель. контраст19
# Булавки, используемые с другими панелями
# Panel. up_button_pin 0,1! # кнопка вверх, если используется
# Panel. down_button_pin 0,0! # кнопка вниз, если используется
# Panel. click_button_pin 1,22! # нажмите кнопку, если используется
Panel. menu_offset 0 # для некоторых панелей потребуется 1 здесь
Панель. encoder_resolution 4
Panel. alpha_jog_feedrate 6000 # x бегущий feedrate в мм/мин
Панель. beta_jog_feedrate 6000 # y пробежка feedrate в мм/мин
Панель. gamma_jog_feedrate 6000 # z пробежка feedrate в мм/мин
Panel. hotend_температура 185 # температура для установки hotend при выборе предварительного нагрева
Панель. Температура кровати 60 # температура установить кровать при выборе предварительного нагрева
# Пример пользовательской записи меню, которая появится в пользовательской записи.
# NOTE _ преобразуется в пространство в меню и команды, | используется для разделения нескольких команд
Custom_menu.power_on.enable true #
Custom_menu.power_on.name Power_on #
Custom_menu.power_on.command M80 #
Custom_menu.power_off.enable true #
Custom_menu.power_off.name Power_off #
Custom_menu.power_off.command M81 #
Custom_menu.fan_on.enable true #
Custom_menu.fan_on.name Fan_on #
Custom_menu.fan_on.command M106 #
Custom_menu.fan_off.enable true #
Custom_menu.fan_off.name Fan_off #
Custom_menu.fan_off.command M107 #
# Нужно только на сглаживаемой доске
Currentcontrol_module_enable накладные #
Return_error_on_unhandled_gcode накладные #
# Модуль переключателя для управления Сервоприводом
Переключатель. сервопривод. Включите true #
Переключатель. сервопривода. input_on_command M280 # M280 S7.5 будет midway
Переключатель. сервопривода. input_off_command M281 # так же, как и M280 S0 0% рабочий цикл, эффективно off
Переключатель. servo. output_pin 1,23 # должен быть PWM способный штырь
Переключатель. servo. output_type hwpwm # H/W вывод pwm с параметром S в input_on_comand
# Switch. servo. pwm_period_ms 20 # установить период до 20 мс (50 Гц) по умолчанию 50 Гц
Характеристики
- Бренд
- BANCUIT
Сопутствующие товары